- The maximum surface power of the vehicle will be no greater than 13 volts, 25 amps
- The vehicle must operate on DC voltage
- there will be no on board power except for the lights
- the vehicle will have three monitors
- the vehicle must be able to be moved without the aid of electrical powered devices
- ROV must be able to dive and surface in a tank no deeper than 4 meters
- Number of people required is 3
- the vehicle must be able to operate in waters between -1 degrees Celsius and 18 degrees Celsius
- the project will require 8 months of design and construction.
- Hydraulics must not exceed 150 psi.
- Pneumatics must not exceed 40 psi.
- The Rov will be controlled and powered through a tether.
- No onboard power supply is allowed except for lights that use 9 volts or less.
- Tools: Wire cutters, Soldering gun, Wire Strippers, band saw, and welding equipment ( possibly)
- Information: propulsion, buoyancy, robotics, electronics, circuitry, and hydrodynamics.
- Materials: aluminum, PVC, copper wires, insulation for wires
- Capital: anywhere between 500 dollars to 1000 dollars, it all depends on the materials used
Sunday, September 23, 2007
Limitations
Specifications
- Electrical components must be properly waterproofed.
- The Rov arm must be able to operate at depths up to 4 meters.
- The Rov arm must be capable of running in fresh, chlorinated water.
- The Rov arm must be able to grab both small and large items.
- The Rov arm must be strong enough to hold at least ten pounds underwater.
- The Rov arm must use as little power as possible.
- ROV arm will be remote controlled
- The arm must pass a safety check and be able to be assembled within 5 minutes
Thursday, September 20, 2007
Testing
Expectations
The robotic arm is expected be able to grab, hold, and release objects retrieved in a pool ranging in depths from zero to four meters. The arm must be able to open and close its claw with ease and precision. The second function is grabbing objects. It must be able to grab any type of objects, ranging from either a light lattice structure sphere to a heavy PVC pipe. It also must be able to pick objects such as rope and thread it through a metal ring or rounded object. The arm should be able to open and close its claw and move in any direction.
Before the ROV arm can be tested a few things must be done. First the arm along with the ROV must be transported to a pool that meets the specifications and limits that the ROV is given, one such pool in the one at Monmouth University(right). Along with the ROV arm the ROV is needed to test the arm, along with a heavy PVC pipe, a small light ball much like a wiffle ball, and a rope and metal circle.
given, one such pool in the one at Monmouth University(right). Along with the ROV arm the ROV is needed to test the arm, along with a heavy PVC pipe, a small light ball much like a wiffle ball, and a rope and metal circle.
Steps
1. Attach arm to ROV in less than five minutes
2. Test arm while out of water: do this by performing all functions of arm detached from ROV and out of water. The arm should be able to open and close its claw and move in any direction.
3. Once the arm has performed the task above, place the vehicle in the pool(right) and allow the ROV to reach the maximum depth before beginning the next phase of testing. The arm should be able to open and close its claw and move in any direction.
4. After basic tests have been completed, the arm now has to perform the tasks which the MATES competition has set down. To simulate these, place the PVC pipe at the bottom of the pool, and allow arm to grasp it. Once the pipe is grasped move the vehicle in all directions to test how well the arm holds the object while in motion.
5. Place the PVC pipe at the bottom of the pool, and allow arm to grasp it. Once the pipe is grasped move the vehicle in all directions to test how well the arm holds the object while in motion.
6. The final task for the arm is for it to grab the rope at the bottom of the pool and see if it can place it through a metal hoop. Test this by grabbing a previously placed rope with the arm. Then move the arm with clasped rope in hand to the loop which is placed at the bottom of the pool and proceed to thread it through the loop(below).
7. The final step is for the ROV and arm to return to the surface and purge all the water, and check for any signs of water leaking into the system.
The robotic arm is expected be able to grab, hold, and release objects retrieved in a pool ranging in depths from zero to four meters. The arm must be able to open and close its claw with ease and precision. The second function is grabbing objects. It must be able to grab any type of objects, ranging from either a light lattice structure sphere to a heavy PVC pipe. It also must be able to pick objects such as rope and thread it through a metal ring or rounded object. The arm should be able to open and close its claw and move in any direction.
Before the ROV arm can be tested a few things must be done. First the arm along with the ROV must be transported to a pool that meets the specifications and limits that the ROV is
 given, one such pool in the one at Monmouth University(right). Along with the ROV arm the ROV is needed to test the arm, along with a heavy PVC pipe, a small light ball much like a wiffle ball, and a rope and metal circle.
given, one such pool in the one at Monmouth University(right). Along with the ROV arm the ROV is needed to test the arm, along with a heavy PVC pipe, a small light ball much like a wiffle ball, and a rope and metal circle.Steps
1. Attach arm to ROV in less than five minutes
2. Test arm while out of water: do this by performing all functions of arm detached from ROV and out of water. The arm should be able to open and close its claw and move in any direction.
3. Once the arm has performed the task above, place the vehicle in the pool(right) and allow the ROV to reach the maximum depth before beginning the next phase of testing. The arm should be able to open and close its claw and move in any direction.

4. After basic tests have been completed, the arm now has to perform the tasks which the MATES competition has set down. To simulate these, place the PVC pipe at the bottom of the pool, and allow arm to grasp it. Once the pipe is grasped move the vehicle in all directions to test how well the arm holds the object while in motion.
5. Place the PVC pipe at the bottom of the pool, and allow arm to grasp it. Once the pipe is grasped move the vehicle in all directions to test how well the arm holds the object while in motion.
6. The final task for the arm is for it to grab the rope at the bottom of the pool and see if it can place it through a metal hoop. Test this by grabbing a previously placed rope with the arm. Then move the arm with clasped rope in hand to the loop which is placed at the bottom of the pool and proceed to thread it through the loop(below).
7. The final step is for the ROV and arm to return to the surface and purge all the water, and check for any signs of water leaking into the system.
First photograph courtesy of SD and LB
"ROVs Pg2." MATE 6th ROV Competition 2007. MATE. 28 Sep 2007. http://www.marinetech.org/rov_competition/2007/results/Photos/ROVs%20Pg%202.html
"ROVs Pg3." MATE 6th ROV Competition 2007. MATE. 28 Sep 2007 http://www.marinetech.org/rov_competition/2007/results/Photos/ROVs%20Pg%203.html.
{kind=link}
Background Information
In today’s world almost everything is done by machine, whether it be making clothes, to cleaning cars, machines can pretty much do it all. However, some machines are starting to push the boundaries of technology, some are going where no machine has gone before, and some 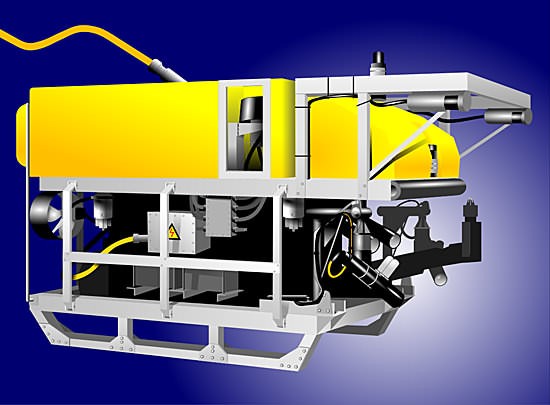 play a key role in the advancement of the world’s economy; one of those machines is the ROV(right).
play a key role in the advancement of the world’s economy; one of those machines is the ROV(right).
play a key role in the advancement of the world’s economy; one of those machines is the ROV(right). Exactly who to credit with developing the first ROV will probably remain clouded. However, there are two who deserve credit. The PUV (Programmed Underwater Vehicle) was a torpedo developed by Luppis-Whitehead Automobile in Austria in 1864, but, the first tethered ROV, named POODLE, was developed by Dimitri Rebikoff in 1953. However the American Navy is credited with advancing the technology which started in the 1960’s. Since that time the technology has grown by leaps and bounds and now ROVS play a key role in the exploration of the oceans. Since ROVS can go where no human can go they provided a great deal of aid to the exploration of the ocean. ROVS since their creation have been steadily advancing in their capabilities and as the need for raw materials increase human kind has turned to the ocean for them. As humans explore deeper parts of the oceans ROVS will need to be able to handle the new conditions set forth to them.
A key component to the ROV is its robotic appendage. Whether the appendage is an arm, claw, or some other attachment; they all perform similar tasks. In 1962 the first industrial arm robot - the Unimate - is introduced. It is designed to complete repetitive or dangerous tasks on a General Motors assembly line; this was the start of a new age of technology. Then in 1969 only seven years after the first robotic arm was invented Victor
Scheinman, a Mechanical Engineering student working in the St anford Artificial Intelligence Lab (AIL) creates the Stanford Arm (right). The arm's design becomes a standard and is still influencing the design of robot arms today. Five years After Victor Scheinman created the Stanford Arm, he starts his own company and starts selling the Silver arm, which can put together small parts. In 1981 Takeo Kanade builds the direct drive arm. It is the first to have motors installed directly into the joints of the arm. This change makes it faster and much more accurate than previous robotic arms.
anford Artificial Intelligence Lab (AIL) creates the Stanford Arm (right). The arm's design becomes a standard and is still influencing the design of robot arms today. Five years After Victor Scheinman created the Stanford Arm, he starts his own company and starts selling the Silver arm, which can put together small parts. In 1981 Takeo Kanade builds the direct drive arm. It is the first to have motors installed directly into the joints of the arm. This change makes it faster and much more accurate than previous robotic arms.
A key component to the ROV is its robotic appendage. Whether the appendage is an arm, claw, or some other attachment; they all perform similar tasks. In 1962 the first industrial arm robot - the Unimate - is introduced. It is designed to complete repetitive or dangerous tasks on a General Motors assembly line; this was the start of a new age of technology. Then in 1969 only seven years after the first robotic arm was invented Victor
Scheinman, a Mechanical Engineering student working in the St
anford Artificial Intelligence Lab (AIL) creates the Stanford Arm (right). The arm's design becomes a standard and is still influencing the design of robot arms today. Five years After Victor Scheinman created the Stanford Arm, he starts his own company and starts selling the Silver arm, which can put together small parts. In 1981 Takeo Kanade builds the direct drive arm. It is the first to have motors installed directly into the joints of the arm. This change makes it faster and much more accurate than previous robotic arms.Today ROVS and the robotic appendages attached to them do many things. Whether the ROV belongs to an oil company, in which case it cleans oil rigs and even searches for oil deposits in the ocean. Or the ROV could belong to a scientific research team, where the ROV collects samples of marine life or mineral deposits for research. No matter what the ROV’s task is, one thing remains the same; the robotic appendage must be able to handle the  situation whether it is from heavy lifting to precise movements of objects the appendage must be able to handle the work load.
situation whether it is from heavy lifting to precise movements of objects the appendage must be able to handle the work load.
situation whether it is from heavy lifting to precise movements of objects the appendage must be able to handle the work load.The MATES competition is designed to promote young students to take part in designing and building ROVS so that there will be future engineers designing the next wave of ROVS. It is important to solve the problem of designing newer and better ROVS so that it is possible to explore the deeper parts of the ocean. To help solve this problem, the user of the solution must be taken into account. The people that would use this robot would be my teammates and I. Each member of the team has his or her own strengths and weaknesses; LB is a strong Xbox gamer and would a great candidate to control both the ROV and arm, LB's only weakness would be his lack of experience in this competition. SD is a another strong candidate to control the ROV and its arm; she is a strong PC gamer as opposed to LB who is a console gamer, SD however has experience at the competition. SD's one weakness is that she is a PC gamer which would require a more difficult control system, which would be difficult to create and use. AF, the final team member is both a PC and console gamer and has experience at this competition before, however, he is not as proficient as SD at PC gaming nor is he as proficient at console gamin as LB is. .
Hazlegreaves, Robert. "ROV." Xara Xone. 23 Sep 2007. Xara Xone Group. 24 Sep 2007
"AUV-ROV-UUV Applications." 23 Sep 2007. Sontek. 24 Sep 2007 .
"Smart Machines." Highlights from the Computer Museum Report . 23 Sep 2007. 24 Sep 2007 .
Design Brief
Design and construct a robotic appendage that will be able to complete any tasks set forth by the MATES competition, which my team of three can operate.
Wednesday, September 19, 2007
MP1 Calender
Week of September 17-21
20. Hand in completed calendar; finish corrections on portfolio, post corrections on blog, and start to redo drawings
21. Continue work on drawings for presentation
Week of September 24-28
24. Finish drawings for robotic arm, scan drawings and send them to mentor
25. Update blog and calendar, start to redo 3d drawings
26. Continue work on 3d drawings, update mentor on progress
27. Finish 3d drawings of arm; send completed drawings to mentor, upload drawings to blog
28. Start preparation for informal presentation, start outline for presentation
Week of October 1-5
1. Finish preparation for presentation, finish outline, update blog
2. Contact mentor for status update, practice for presentation
3. Presentation, hand in Outline and up to date web blog
4. Presentation
5. Presentation
Week of October 8-12
8. Start selection rejection report
9. Continue work on selection rejection report, focusing on imagery for it, update blog
10. Work on the pros and cons of solution one of selection rejection report
11. work on second solutions pros and cons for report
12. work on third solutions pros and cons for report, update blog
Week of October 15-19
15. Finish up selection rejection report and up date mentor on progress
16. Make final corrections and upload selection rejection to blog, update calendar on blog
17. Start to design model, layout all materials needed to create model
18. Start to measure and materials need for model and begin to cut them to size
19. Finish measuring and cutting all materials for model, update blog
Week of October 22- 26
22. Start to attach materials to each other, and contact mentor for update on progress of project
23. Continue to assemble model, update blog
24. Continue with the assembly of model
25. Finish assembly of model, take pictures of it and send to mentor
26. Update blog; start to prepare blog for formal presentation
Week of October 29- November 2
29. Start outline for formal presentation
30. Update blog, continue work on outline, and prepare for presentation
31. Hand in outline, mentor contacts, selection rejection report, and model
1. Presentations
2. Presentations
Week of November 5-9
5. Presentations
6. Update both blog and mentor
7. Start new calendar for MP2
8. Start developmental work
9. Start developmental work
Week of November 12-13
12. Start developmental work
13. Start developmental work
Tuesday, September 18, 2007
Subscribe to:
Comments (Atom)